Control Moment Gyroscopes vs Reaction Wheels

Key Points
- Reaction wheels are the most common approach for small spacecraft. Gyroscopes are the most common approach for medium to large spacecraft.
- Reaction wheels are simpler mechanically and computationally, making them more cost effective and reliable. If they generate sufficient torque and momentum storage for your needs, that is the recommended solution.
- Traditionally, one of the things holding gyroscopes back from broader use is their control algorithm complexity. Inverting matrices in real-time has been beyond the computational limits of small spacecraft. That is changing as the industry matures.
Introduction
Choosing which to go with is sometimes an engineering decision and sometimes a budget decision. If you want the most agile, lowest power solution then you choose Control Moment Gyroscopes, but be prepared to spend more money and time getting them to work with your system. If you want the most affordable and easiest-to-implement solution then you choose Reaction Wheels and you accept the lower performance. (This lower performance may be plenty for what you need anyway.)
A Bit More Detail
The two plots below show the torque vs. mass and the torque vs. power respectively for current off-the-shelf reaction wheels and control moment gyroscopes.
In the first plot, there isn’t much overlap but you can still see what people mean when they say you get much more torque from control moment gyroscopes than you do for a reaction wheel of about the same mass. You can also see that the torque from the reaction wheels barely looks to be above zero. This isn’t far from the truth as most “off the shelf” reaction wheels you can buy generate less than 0.3 Nm of torque. That’s plenty for small satellites and essentially nothing for a spacecraft of any size that wants to be agile.
*Note that masses may not include control electronics for some of the smallest wheels
In the second plot, you can again see how much more torque you get from control moment gyroscopes for each Watt than you get from reaction wheels. Even though it’s true that this plot is for peak torques and power so may not be indicative of your everyday use, there aren’t enough errors in the plot to close the gap of orders of magnitude more torque.
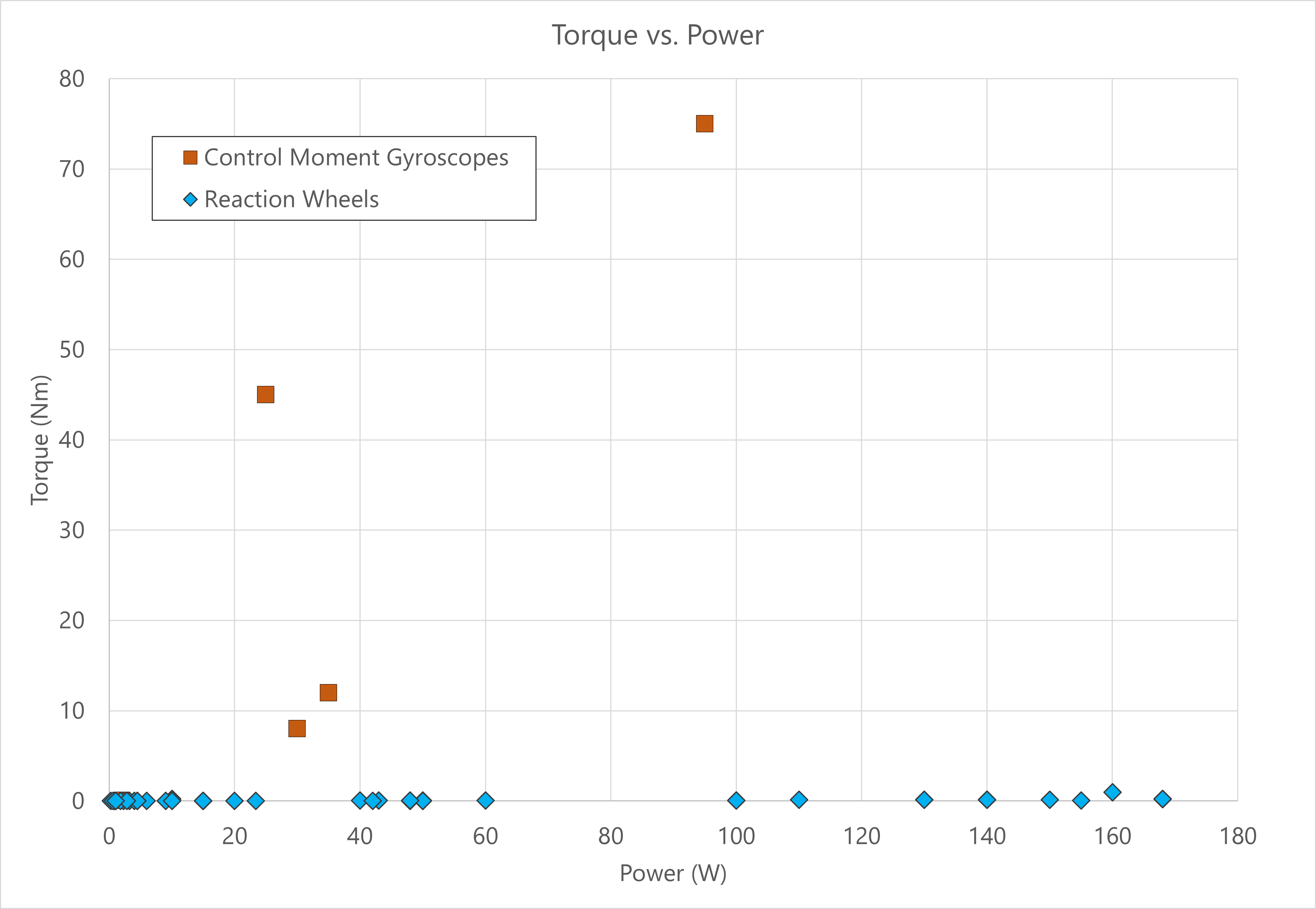
* Note that peak power can be several times larger than nominal power draw
Mechanical Complexity
Both approaches rely on bearings, which always take more engineering work than people expect and continue to be a primary source of failure. Control moment gyroscopes, though, have additional sets of bearings because there’s the wheel and then there are the gimbals that twist the wheel around in various axes.
The gyroscope gimbals also take up additional volume so gyroscopes tend to have large volumes. The difference is somewhat smaller than some might expect because you get more torque from them so they can be smaller relative to reaction wheels that need bigger wheels to get more angular momentum change.
For both approaches, their performance is improved if you know your spacecraft’s mass and inertia properties to high precision. Knowing the structural modes of your spacecraft (and keeping them away from the bands of your control loop) can make for interesting design and test loops that novice builders may not expect. Expect your mechanical complexity around your solution to increase as your spacecraft becomes larger.
Control Algorithm Complexity
The biggest challenge with control moment gyroscopes is that they have singularity points where the gimbal and wheel axes line up and can no longer provide torque about that axes. They can also line up with constant external torque and become functionally useless until thrusters or some other device help them realign. Most solutions avoid these problems by taking circuitous routes to get your spacecraft pointing to where you want it to. Specifically, you may find yourself torquing in a sequence of axes even if you just wanted to spin 90 degrees on a single axis.
Curated Videos
1. https://www.youtube.com/watch?v=4aF7zwhlDDU
This well-animated video covers the ISS control and stability, including the differences between reaction wheels and control moment gyroscopes. Well worth a watch.
2. https://www.youtube.com/watch?v=pJfMFUcquWM
An engineer is exploring different types of robots. In this video, they compare the two control types and build one in detail. It's great for showing the differences and also some of the practical details of building your own system.
Curated Papers
Votel, Ronny, and Doug Sinclair. "Comparison of control moment gyros and reaction wheels for small Earth-observing satellites." (2012).
https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1080&context=smallsat
This study uses dimensional analysis of spacecraft to determine when you might consider going with gyroscopes instead of reaction wheels. They show that a satellite with a mass greater than 30 kg and/or an inertia greater than 1 kg-m^2 is a good threshold where you might consider them. Additionally, anything over 100 kg has little choice but to use them. The thesis of their argument is that solar panels scale with the square of your satellite’s size while the power required by reaction wheels goes up with a power of 5.